
Abstract
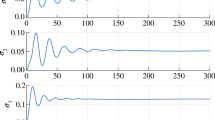
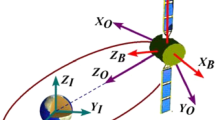
The paper deals with trajectory tracking for a flexible spacecraft, subject to a gravity-gradient disturbance, under parameter uncertainties. The controls are gas jets and reaction wheels, and the measured variables describe the attitude and angular velocity of the rigid part. The flexible dynamics is treated as an additional disturbance acting on a rigid structure. First, an adaptive control is designed with only the gravity-gradient disturbance acting on the spacecraft; second, it is proved to be effective also in the presence of disturbance due to the flexibility, provided that appropriate robustness conditions on the controller gains are satisfied. These conditions use partial knowledge of the parameters describing the elastic dynamics. Simulations show the good performance of such control scheme and demonstrate its applicability even in the presence of input saturation.
Similar content being viewed by others

References
Crouch, P. E., Spacecraft Attitude Control and Stabilization: Applications of Geometric Control Theory to Rigid Body Models, IEEE Transactions on Automatic Control, Vol. 29, pp. 321–331, 1984.
Dwyer, T. A. W., Exact Nonlinear Control of Large-Angle Rotational Maneuvers, IEEE Transactions on Automatic Control, Vol. 29, pp. 769–774, 1984.
Monaco, S., and Stornelli, S., A Nonlinear Feedback Control Law for Attitude Control, Algebraic and Geometric Methods in Nonlinear Control Theory, Edited by M. Hazewinkel and M. Fliess, Reidel, Dordrecht, Holland, pp. 573–595, 1986.
Lian, K. Y., Wang, L. S., and Fu, L. C., Controllability of Spacecraft Systems in a Central Gravitational Field, Proceedings of the 32nd Conference on Decision and Control, pp. 3105–3110, 1993.
Lian, K. Y., Wang, L. S., and Fu, L. C., Controllability of Spacecraft in a Central Gravitational Field, IEEE Transactions on Automatic Control, Vol. 39, pp. 2426–2441, 1994.
Wen, J. T., and Kreutz-Delgado, K., The Attitude Control Problem, IEEE Transactions on Automatic Control, Vol. 36, pp. 1148–1162, 1991.
Singh, S. N., Nonlinear Adaptive Attitude Control of Spacecraft, IEEE Transactions on Aerospace and Electronic Systems, Vol. 23, pp. 371–379, 1987.
Singh, S. N., Nonlinear Adaptive Attitude Control of Satellite Using Gyrotorquers, Proceedings of the 29th Conference on Decision and Control, pp. 3357–3361, 1990.
Dwyer, T. A., Sira-Ramirez, H., Monaco, S., and Stornelli, S., Variable-Structure Control of Globally Feedback Decoupled Deformable Vehicle Maneuvers, Proceedings of the 27th Conference on Decision and Control, pp. 1281–1287, 1987.
Monaco, S., and Stornelli, S., A Nonlinear Attitude Control Law for a Satellite with Flexible Appendages, Proceedings of the 24th Conference on Decision and Control, pp. 1654–1659, 1985.
Monaco, S., Normand-Cyrot, D., and Stornelli, S., Sampled Nonlinear Control for Large-Angle Maneuvers of Flexible Spacecraft, ESA SP-255, pp. 31–38, 1986.
Singh, S. N., Robust Nonlinear Attitude Control of Flexible Spacecraft, IEEE Transactions on Aerospace and Electronic Systems, Vol. 23, pp. 380–387, 1987.
Azam, M., Singh, S. N., Iyer, A., and Kakad, Y. P., Detumbling and Reorientation Maneuvers and Stabilization of NASA SCOLE System, IEEE Transactions on Aerospace and Electronic Systems, Vol. 28, pp. 80–91, 1992.
Azam, M., Singh, S. N., Iyer, A., and Kakad, Y. P., Nonlinear Rotational Maneuver and Vibration Damping of NASA SCOLE System, Acta Astronautica, Vol. 32, pp. 211–220, 1994.
Georgiou, G., Di Gennaro, S., Monaco, S., and Normand-Cyrot, D., On the Nonlinear Adaptive Control of a Flexible Spacecraft, ESA SP-323, pp. 509–514, 1991.
Singh, S. N., Rotational Maneuver of Nonlinear Uncertain Elastic Spacecraft, IEEE Transactions on Aerospace and Electronic Systems, Vol. 24, pp. 114–123, 1988.
Singh, S. N., Nonlinear Attitude Control of Flexible Spacecraft under Disturbance Torque, Acta Astronautica, Vol. 13, pp. 507–514, 1986.
Ickes, B. P., A New Method for Performing Digital Control System Attitude Computations Using Quaternions, AIAA Journal, Vol. 8, pp. 13–17, 1970.
Wertz, J., Editor, Spacecraft Attitude Determination and Control, Kluwer Academic Publishers, Dordrecht, Holland, 1978.
Yuan, J. S. C., Closed-Loop Manipulator Control Using Quaternion Feedback, IEEE Journal of Robotics and Automation, Vol. 4, pp. 434–440, 1988.
Sastry, S. S., and Bodson, M., Adaptive Control: Stability, Convergence, and Robustness, Prentice-Hall, Englewood Cliffs, New Jersey, 1989.
Khalil, H. K., Nonlinear Systems, Macmillan Publishing Company, New York, New York, 1992.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Di Gennaro, S. Adaptive Robust Tracking for Flexible Spacecraft in Presence of Disturbances. Journal of Optimization Theory and Applications 98, 545–568 (1998). https://doi.org/10.1023/A:1022667811792
Issue Date:
DOI: https://doi.org/10.1023/A:1022667811792