Peaucellier-Lipkin linkage
4. Peaucellier-Lipkin linkage
Interest in linkages came from the insight that one could use such devices to generate curves in a way that was precise. One of the early examples of such a linkage was developed by Peaucellier. His accomplishment (and the independent work of Lipkin) was noteworthy because some were beginning to think that designing a linkage to convert circular to linear motion was not possible. Watt's linkage only yielded an approximation.
Although one way of thinking of the Peaucellier-Lipkin linkage is that it converts circular motion to linear motion, there is a more general perspective: as one tracer point moves along one curve (say a circle), another pen point draws a portion of another curve. The big idea here is that of the geometric transformation known as inversion in a circle. This transformation rivals in importance the more familiar transformations of reflection, translation, and rotation, which transform the plane onto itself. Given a fixed circle C of radius r and any point P in the plane other than the center O of C, inversion with respect to C transforms P to P* where P and P* are collinear with O and related as follows:
OP x OP* = r2
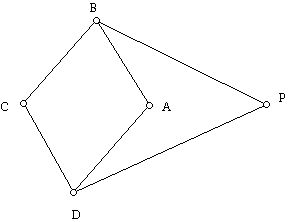
Among the many remarkable features of this transformation is that it maps circles and lines to circles and lines. In particular, if a circle passes through the center of the circle O, then inversion maps this circle into a straight line. The Peaucellier-Lipkin linkage, which includes rods that form circuits, can be understood using the diagram below. The segments are such that the lengths of AB, BC, CD, and DA are equal but have a different length (in general) from BP and DP, which are also equal in length. One can easily verify that the point A, C, and P under these circumstances are forced to lie on a straight line. Furthermore, if AB has length a and PB has length b, then one can verify that PC x PA = b2 - a2. (Here is a derivation: PC x PA = (PE - AE) x (PE + AE) where E is the point where the diagonals of the rhombus ABCD meet. Now we have that PC x PA = PE2 - AE2 = b2 - DE2 (using the Pythagorean theorem) - AE2 = b2 - a2 (again using the Pythagorean theorem).) We can conclude, therefore, that C and A are inverse points with respect to a circle whose center O is a point equidistant from P and A. If one adds an additional rod that has length b2 - a2 and is pinned down at O, as A moves along a circle of radius b2 - a2 , and P is pinned, then C will move along a stretch of straight line. (This line will be perpendicular to the line though O and P.) As described here the linkage involved has seven links of three different lengths.
Although linkages as a subject went well beneath the radar of the mathematics community for some time, interest in these problems has been rekindled by new developments in engineering (robotics) and computer science.
-
Introduction
-
Some history
-
Basic ideas
-
Peaucellier-Lipkin linkage
-
Sneak preview: carpenter's ruler problems
-
References
Welcome to the
Feature Column!
These web essays are designed for those who have already discovered the joys of mathematics as well as for those who may be uncomfortable with mathematics.
Read more . . .
Feature Column at a glance