Are Precise Definitions a Good Idea?
The issue of how definitions help mathematical progress is considered below....
 Joseph Malkevitch
Joseph Malkevitch
York College (CUNY)
Email Joseph Malkevitch
Introduction
Below (Figure 1) is shown a sample of diagrams of geometrical objects drawn in the plane.
What do these shapes have in common? Or from a different perspective, if one considers any pair of the shapes, how are they alike or the same and how are they different?
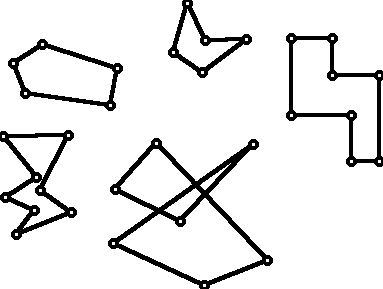
Figure 1 (A sampler of shapes often described as polygons.)
How does the shape (Figure 2) resemble or differ from the shapes in Figure 1?

Figure 2 (Outside shape is a
Reuleaux polygon (triangle), showing how the shape is connected with that of an equilateral triangle. Diagram courtesy of Wikipedia)
Many of these shapes (Figures 1 and 2) have names that involve the word "polygon." However, these polygons seem on first glance to have little in common. Note that in Figure 1 corners are accentuated while in Figure 2 they are not. Does this matter for the definition of these shapes? Also, note that the sections between the corners in Figure 2 are circular arcs.
Mathematicians use words, the way people generally do, in order to communicate meaning and ideas. However, what definition would encompass all of these objects? Mathematics aims at precision but it also aims at another goal--generating new mathematics. While mathematics occasionally grows by the resolution of open problems from years ago, it more typically grows because concepts evolve and new ways are found to make distinctions between objects that were considered indistinguishable. The issue of how definitions help mathematical progress is considered below.
What is a polygon?
Perhaps the most important book in the whole history of mathematics is Euclid's Elements. Among many other aspects of this remarkable book is that it calls attention to polygonal shapes we see in daily life--triangles and quadrilaterals, for example, and The Elements explores properties of these shapes which are not always easy to realize quickly. We need to have some additional words to talk about the features of polygons that seem the basis for what the objects in Figure 1 have in common. Polygons have corners (sometimes called vertices) and sides (sometimes called edges) and in some cases have a region that they bound, the "interior" of the polygon. And how does one tell which points of the "plane" are inside a quadrilateral and which points are not? What are the definitions of inside and outside for a geometric shape? While this may seem very straightforward, it was not fully understood until the work of Camille Jordan in the 19th century. Jordan's work on his "Jordan Curve" theorem was not quite right; only later were the full implications of what is meant by the interior, boundary, and exterior of a polygon or a curve made precise. One polygon in Figure 1 does not have an "interior" because it intersects itself. There are also angles (interior and exterior) between the consecutive pieces that make up the sides of the polygons, and these angles can be acute, straight (180 degrees), or obtuse. Furthermore, it is convenient, although polygons deal with geometry and shape, to use numbers for describing polygons. Thus, we can count the number of vertices of a polygon, count the number of sides of a polygon and measure interior and exterior angles of a polygon. Look at the diagram in Figure 3a. Does this polygon have 3 or 4 sides?
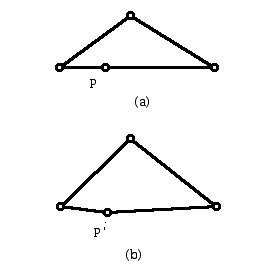
Figure 3 ((a) Three sides or 4-sides? (b) Small change in position of P to P')
The distinction made between Figure 3a and Figure 3b is that three of the vertices in the upper polygon lie on a straight line and, thus, there is a temptation to call Figure 3a a 3-gon (triangle) but it would usually qualify as a 4-gon (quadrilateral). Another aspect of these two shapes is that a small change in the position of a point of the polygon makes a big difference. In some definitions, polygons behave nicely with regard to "continuity." Thus as P' in Figure 3b gets closer to the corner to its left, what happens? In some definitions we would not allow two vertices of a polygon to coincide yet in other definitions they can coincide. But are the vertices of a quadrilateral the same as the corners of the quadrilateral and are the sides of the quadrilateral the same as the edges of the quadrilateral? Sometimes a definition of polygon refers to its vertices being in "general position." Sometimes this means that no three points are on a single straight line, and sometimes additionally that no four points lie on a circle. We will put aside some of the confusion sometimes caused by what words really mean and try to proceed in an informal way.
Can one think of a circle as a polygon with an infinite number of sides? Most approaches to polygons would not allow this but some definitions of a polygon allow infinitely many vertices and sides and yet would not make a circle a polygon.
But as discussed in Euclid there are interesting connections between circles and polygons. The measure of an angle inscribed in a circle is 1/2 the measure of the arc of the circle that it cuts:

Figure 4 (Illustration of the inscribed angle theorem for a circle. Courtesy of Wikipedia)
In terms of polygons, one consequence of this theorem is that if the line AB in Figure 4 is a diameter of the circle, then the angle alpha is a right angle and triangle ABM would be a right triangle. A nifty fact about quadrilaterals is that if the perpendicular bisectors of the 4 sides meet at a single point, then there is a circle which passes through the 4 vertices of the quadrilateral and the quadrilateral is often described as a cyclic quadrilateral. Euclid has a different appealing and useful result about quadrilaterals. In the Elements, Book III, Proposition 22 it is shown that the opposite angles of a cyclic quadrilateral add to two right angles. Some well-known examples of cyclic quadrilaterals as well as some more exotic examples are shown in Figure 5.
Figure 5 (Quadrilaterals with vertices on a circle--cyclic quadrilaterals. Courtesy of Wikipedia)
The many editions of Euclid show many diagrams of quadrilaterals, but I don't know any edition of Euclid that shows the shape in Figure 6.
Figure 6 (A non-convex quadrilateral drawn in the plane.)
Looking at Figure 6 what we see does not seem too remarkable to the modern eye. It shows a non-convex quadrilateral. So in the long history of geometric figures which today we call polygons we now distinguish between polygons which are convex and those which are not. Intuitively, polygons are convex if they don't have notches, dents, or holes. The first use of the word "convex" in English in a mathematical context seems, according to the Oxford English Dictionary, to have been its use by Thomas Diegges (an English mathematician and astronomer) in 1571. But this early use of convex perhaps was for sets more general than polygons. It may have been that the first usage of the phrase "convex polygon" occurred as late as the 19th century when David Brewster wrote a book dealing with geometry that incorporated ideas of the French mathematician Legendre. But wait. When we talk about a quadrilateral are we talking about the 4 "rods" that make up the shape or is a quadrilateral a region which includes points of the rods AB, BC, CD, and DA (when the quadrilateral's vertices are labeled A, B, C, D in cyclic order) and also the points in the region that these rods bound? The reason this issue becomes important is in shedding light on what convexity means.
Definition:
A set X is convex if for any two points P and Q of X the line segment joining P and Q is a subset of X.
Now in looking at the quadrilateral in Figure 3b we would like to call it a convex quadrilateral. But strictly speaking if the shape there is an object made only of rods, it will not be convex. To make this polygon convex would require talking about the polygon together with its interior. I think of polygons as rod structures, yet I am not always careful to point out that in referring to a convex polygon I really should say that the polygon with its interior is convex. Note that the shape in Figure 6, including its interior is non-convex. Even though I will think of polygons as rod structures, when it comes to issues of convexity for simple polygons (ones that don't intersect themselves) I will have in mind the rods together with their interior region. New words help formulate new questions.
Can a non-convex simple quadrilateral be equilateral, that is, have all of its sides of equal length?
Can a non-convex simple quadrilateral be equiangular, that is, have all of its angles of the same size?
Certainly some non-convex polygons can be equilateral, as shown by the diagram in Figure
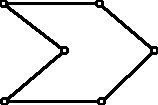
Figure 7 (An equilateral non-convex 6-gon drawn in the plane.)
One way to distinguish between rod versions of a polygon and the version which includes the membrane that consists of the region involved is to shade the interior of the region as in the diagram in Figure 8.
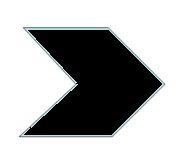
Figure 8 (A con-convex equilateral hexagon with its interior shaded black.)
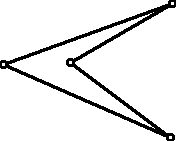
Is the geometric object in Figure 9 a polygon?
Figure 9 (A self-intersecting heptagon drawn in the plane.)
Of course if the definition we give permits it to be a polygon, it will be one. What makes it different from the other things you may more comfortably be willing to call a polygon is that it has edges which intersect at points other than vertices. When this happens for a polygon we usually say the polygon is not simple. However, for this polygon and others we have looked at so far, there is an additional complication with the meaning of polygon. To communicate about mathematics we use words and diagrams, and diagrams are typically drawn on a flat piece of paper. So it is possible that the drawing in Figure 9 is actually a collection of 7 points in 3-dimensional space and we are looking down at this geometric object from a long distance away and, thus, we are seeing a "projection" of a rod structure in 3-space down into 2-dimensional space. This projection has self-intersections but the original polygon in 3-space does not. So when we define polygon we may need to clarify whether the "polygon" we are thinking about "lives" in 2 dimensions, 3 dimensions, or 47 dimensions. Actually, we can interpret the diagrams above as objects that sit in 2-D or a higher dimension. Often in a discussion of polygons it is just stated, typically not as part of the definition, that the discussion is taking place in 2-D.
Recent reforms in mathematics education have argued for more conceptual approaches to mathematics and to get away from computation and mechanics of solving repetitive exercises. This is fine and good up to the point one realizes that very often the foundations of mathematics are neither cut and dried nor easy. Many mathematicians will decry the difficulty that many students seem to have that the real number .9999..... equals the real number 1. However, the real numbers are much more subtle to understand than mathematicians often would like to admit. Sometimes we are interested in the real numbers in the form 7/11, sometimes in the form .125, sometimes in the form .3333 and sometimes in the form .3333........ In working with "simple" arithmetic students are often left in the dark. Perhaps the diagram below
Figure 10 (4 by 3 array of dots.)
may help students "see" that the multiplication problem 4x3 and 3x4 give the same result. But does this make it easier to see that (7/8)(2/9) is the same as (2/9)(7/8) and that the answer can be expressed as 7/36?
Polygons are fraught with similarly complex notions in order to understand them from a rich perspective. What perspectives are there? One perspective is the day-to-day needs of a typical American. Such a person might need to know about the idea of the perimeter of a polygon and the area of a polygon, but if a polygon does not include its "interior," it has no area! The reason why polygons ae important is that polygonal shapes are very common. Sheets of paper, shape of rooms, rugs, and many other common objects are polygons. And when we engage with these objects we might want to know, what is the amount of wall-to-wall carpet needed for the complicated polygonal living room in our new apartment. What is the number of rectangular dressers which will fit into an L-shaped alcove?
Another perspective on definitions is their role in teaching mathematics to pre-college students. Mathematics starting in kindergarten provides students with insights into the core aspects of mathematics--patterns, number and shapes. But education goes beyond the transmission of knowledge from one generation to another. It is extraordinarily difficult to get off the tracks that conveyk nowledge of the past and to forage off the tracks into new domains that enrich knowledge. Descartes' and Fermat's development of analytical geometry, Newton's and Leibnitz' development of the Calculus, the development of the concept of symmetry are all examples of changes that enriched our understanding. This could be done with knowledge from the past but also offered new windows to developing new knowledge and also new applications. There were amazing engineering feats in the ancient world: pyramids, roads, aqueducts, etc. But the engineering feats of the last 100 years, landing a man on the moon, landing orbiters on Mars, sending reconnaissance vehicles to Pluto and beyond, and landing a spacecraft on a comet could not have been done using merely the knowledge available to Euclid, Archimedes, Pappus, or Ptolemy.
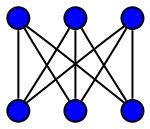
While the concept of a polygon is small in scale with the ideas that were involved with the evolution of Calculus, geometry provides a laboratory for seeing how incremental changes in the way we look at certain domains are engines for the development of new mathematical ideas. While graph theory as a subject comes much later (Euler in the 18th century) than the geometry of polygons and their 3-dimensional analogue polyhedra that were already in sophisticated form in Euclid's Elements, there are some advantages to using hindsight to help conceptualize about earlier ideas. Intuitively, a graph is a diagram consisting of dots and lines (or curves) that join up the dots. People interested "only" in graph theory have to worry about definitional issues such as whether graphs need to have a finite number of vertices and/or edges and whether one allows dots to be joined to themselves with a single edge (loop) or whether two distinct vertices can be joined with several edges (multiple edges). Again, here I will proceed in an informal manner. One can see a sample of a graph in Figure 11.

Figure 11 (Example of a graph, a geometric figure made of dots and curves.)
Note that straight line segments are not required (we could use curves), and we allow two edges to meet at a point which is not a vertex of the graph. There is one such point in the graph drawing above. When all of the "curves" in a drawing of a graph in the plane joining up the the dots are straight, then one speaks of a geometric graph. Graph theory is a relatively recent subject, but it does help one see aspects of polygons with more clarity than trying to deal only with the traditional point of view. Graphs are typically thought of as combinatorial objects rather than metrical ones. Thus, all the geometric objects with their claims on the word polygon, in Figures 1 and 2 can be thought of as graphs. There are different ways of drawing the graph in Figure 11 and yet still have a graph which is "isomorphic," that is, has the same structure as the graph in Figure 11. In particular, we can redraw the graph so that the one curved edge will no longer be present and one can eliminate the one edge crossing at a point which is not a vertex.
Look at Figure 3. It shows on a flat piece of paper two geometrical shapes with 4 vertices, linked with straight line rods but there are other issues lurking here. Can we really be sure that all 4 of the corners lie in a single plane? Can we really be sure that three of the points don't lie on a straight line? The line segments look straight and look as if given any two points along a segment, there is always another point on the segment between them. Might it not be possible for there to be infinitely many points along a straight line but there be gaps or holes nonetheless in the lines? These issues are real to geometry theorists (researchers) but at what level of a child's education will raising some of these questions yield insight to typical students rather than causing confusion?
Some would argue that using diagrams such as the ones I have shown is unwise. If we get rid of the diagrams then some potential confusions would also disappear. Unfortunately, a new set of issues now takes its place. Some individuals have trouble "seeing" what a concept is when described totally by words but without diagrams. Furthermore, how do we get people to agree on what constitutes an object whose definition uses only a particular word? For example, "trapezoid" is a relatively common word but there are different text books that define the word differently, using English words. Using only words puts one in the position that English speakers have trouble interacting with people who only speak Korean. Furthermore, this approach requires one to recognize that geometric definitions require "undefined" terms as part of their structure. In the end, one is reduced to saying a point is like this dot in this diagram. Euclid's definitions are not that helpful unless one augments the words with pictures to get the ideas across.
One of the more subtle aspects of learning to count and measure is that there is a difference between the concept of a number such as 3, 5/6, -6, and π and the symbols used to represent these numbers. The number three can be written in base 10 as 3 and in base 2 (binary) as 11. Similarly, there are issues about the concept of a polygon and drawings of the polygons in a plane. It may seem not "right" that some of the diagrams shown in the Figures have line segments that meet each other. If we are thinking of polygons as "rods" this is not physically possible but it is the way we will chose to think about polygons.
Comments?
More on rods and regions
One issue that constantly "plagues" insights into polygons is whether they are regions or just a collection of rods. If a polygon is a collection of rods then questions involving the area of a polygon are confusing because a collection of rods does not have an area. Despite concern with precision it is not uncommon to hear the question: What is the area of a (Euclidean) circle? The usual definition of a (Euclidean) circle is that it is the set of points in a plane whose distance to a point C (the center of the circle) is a fixed distance r. Thus, a circle can be thought of as a piece of wire rather than as a region. The region which a circle bounds has area π(r2) but the piece of wire has 0 area. Also, if concerned with precision, one must make sure to talk about circles involving Euclidean distance, since one can also in a precise manner talk about the area of a circle in the Taxicab Plane. Taxicab geometry uses a different distance function than does the Euclidean Plane. What one should say carefully is that one is interested in the region that lies in the interior of the collection of rods, but for a polygon which intersects itself (suitably defined!) does it make any sense to talk about the area of the region inside the polygon? By being clever and using signed area ideas one can indeed make sense of the notation of area for a self-intersecting polygon.
In considering the pros and cons of a rods versus regions approach to polygons from the point of view of furthering mathematical understanding into this important collection of geometric objects, the kinds of questions that come to mind for rod polygons is different from region polygons. For example, if one handles a physical rods model (made out of sticks with the vertices where the sticks meet are joints and where the sticks can move (flex) with respect to one-another), one quickly sees that triangles are rigid and polygons with 4 or more sides are not. Intuitively, rigid means that the polygon does not distort shape as one pushes on the vertices with one's fingers. However, rigidity of a polygon (or polyhedron) is a subtle issue and requires very careful definitions to make sure what one has in mind really is conveyed. If you have a triangle made of thin wood sticks it will not flex, but if you take two vertices of the triangle ABC, say A and B, and push with enough force along the segment AB then the stick will start to buckle and eventually crack. So when mathematicians try to understand rigidity they are in part performing work that is of interest to physicists and mechanical engineers. While we are usually more concerned with rigidity issues in three dimensions in connection with making sure buildings do not collapse, there are interesting questions about rigidity for structures confined to a plane.
Time of reckoning
So what is a reasonable definition of polygon? I hope the discussion so far has indicated that this is not as critical an issue as at first glance it may appear. More important is to have a basic "gut feeling" about the core idea behind what a polygon is. For me, and not everyone will agree, the important parts of what makes a geometric figure a polygon are:
a. The pieces that make it up are straight line segments.
b. Viewing a polygon as a graph, the edges of a polygon form a single circuit and there are no other vertices and edges in the graph.
c. Polygons have at least 3 vertices.
Comment: The number of sides and number of vertices of a polygon (independent of whether the vertices lie consecutively on a line when drawn in the plane) is the number of vertices and edges of the polygon thought of as a graph. A "polygonal" annulus, the region between two polygons, would not be a polygon under this definition though some might call the diagram in Figure 12 a polygon with a single hole. The graph here consists of two circuits, not a single circuit.

Figure 12 (The diagram does not qualify as a polygon under the usual definitions of polygon.)
In light of these thoughts, Figure 2 is a Reuleaux polygon but it is not a polygon! Often mathematicians will allow an adjective as a way to modify the meaning of a term that it is associated with in a "confusing" way. What is special about Figure 2 is it is a curve of constant width with three corner points. There are curves of constant width with any odd (greater than 3) finite number of corner points but there are also "smooth" curves of constant width. I don't think much is gained by adding the word polygon after the Reuleaux, the person who is associated with the discovery of the unexpected phenomenon of plane sets of constant width.
Even without perhaps having to worry about what a polygon is, many people are charmed by them. Not surprisingly artists have been attracted to polygons as a source of inspiration. Dorothea Rockburne has many works that show polygons of different shapes but perhaps particularly remarkable is the series of paintings by the artist Frank Stella inspired by polygons. If you are pleased by his work, you can still purchase a copy of the catalogue for the exhibit of these works.
Comments?
Line versus segments versus rays
A few comments about drawings of shapes as they appear here and the notion of a polygon. We all have an idealized notion of what a straight Euclidean line or a straight line segment is in various contexts: the edge of a ruler, the edge of a piece of photocopy paper, or what one observes in computer drawings with ragged edges.

Figure 13
In pursuing being careful in defining words, mathematicians make careful distinctions. Let me illustrate the complexities with the seemingly straightforward notation of a line. Mathematicians make a distinction between the environment in which various terms are being used. Thus, a line may be discussed in the Euclidean plane, in a hyperbolic plane, or in a projective plane. Typically in the Euclidean plane and a hyperbolic plane when the term line is used, it is one of the "undefined" terms that is part of the axiomatic development of the subject. However, in your mind's eye, you have a mental model or physical model of such lines and as such these objects "go on forever." They are usually thought of as infinite objects, with infinitely many points making up the line, and they also have "infinite" length. But in some projective planes there are complications. Thus, the real projective plane, whose lines mathematics majors often identify with great circles on a sphere in Euclidean 3-space, the lines have infinitely many points but are not "infinitely" long in the sense that if you move along a line for long enough you come back to a point you have been at before and you can keep "going." Sometimes this situation is expressed as that the lines of the real projective plane can be thought of as finite but unbounded.
We know now that one can't define all of the words in a mathematical system; usually one works with undefined terms and axioms. But Euclid tried to define all of his words and for students in low grades we talk about straight lines in contrast to curves to get the idea of a Euclidean line across. It is helpful to remember what Euclid wrote as definitions of his "atomic" terms for his development of geometry.
Euclid's Definitions
Definition 1.
A point is that which has no part.
Definition 2.
A line is breadthless length.
Definition 3.
The ends (extremities) of a line are points.
Definition 4.
A straight line is a line which lies evenly with the points on itself.
Already there are issues. Does Euclid have in mind defining line or line segment? Exactly what distinction is Euclid trying to make between a line and a straight line? When he says line, does he have perhaps something more general in mind, perhaps the notion of a curve, with lines coming in different "flavors," including straight ones? Uncertainty arises since he has definitions of line and straight line and his definition of straight line uses the word line.
As long as you restrict yourself to Euclidean geometry rather than the more general discussion of geometry as it evolved in the 19th century culminating in David Hilbert's famous Foundations of Geometry, you can proceed in a somewhat informal basis and try to get across the distinction between line, ray, and line segment. Sometimes precision can be an "enemy."
Is an angle (Figure 14) a polygon? Let us take the interpretation of Figure 14 as consisting of two rays, leaving aside for the moment whether we are including the points that lie between or within these two rays.
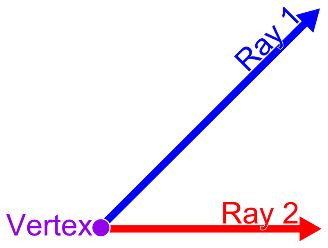
Figure 14 (An angle. Courtesy of Wikipedia.)
From my point of view, since Figure 14 is not a graph which is a circuit, it is not a polygon but there are features of an angle that are akin to a polygon!
Comments?
Amazing results about polygons
Among the nifty theorems about polygons (here thought of as including their interior points) that deserve to be better known is the Bolyai-Gerwien-Wallace Theorem. It is fairly clear that if two simple plane polygons have area such that if one can cut the first polygon into polygonal pieces and reassemble the parts to form the other polygon, then the two polygons will have the same area. But what about the converse? If two polygons have the same area, can the first be cut up into polygonal pieces and assembled to form the other polygon? Remarkably, the answer is yes, and this is the content of the Wallace-Bolyai-Gerwien Theorem.
The Bolyai involved here is not Janos Bolyai, the famous geometer who was one of the co-discoverers of classical non-Euclidean geometries, the so-called Bolyai-Lobachevsky Plane (Hyperbolic Geometry). Rather it is the father of Janos Bolyai, Farkus Bolyai.
Figure 15 (Drawing of Farkus Bolyai.)
Where do you start with finding the area of polygonal figures? A natural place to begin is with a rectangle and defining the area of a rectangle to be the product of its length and width. This seems a sensible approach in that if you have a 1x1 square tile, you can think of this as having area 1 and can measure the area of more complex figures using this simple tile as a way to measure the area of more complex geometric figures. Although this seems reasonable, it does hide many subtle issues. For a 3x2 rectangle, that it has area 6 seems intuitively clear but what about a rectangle which has sides of length √2 and √18? Using one's knowledge of square roots, (√2)(√18) = √36 = 6. Thus, these two rectangles have the same area.
To understand the spirit of what is done here you can see how to take a parallelogram such as ABCD in Figure 16 and see that it has the same area as a rectangle HBCH'. What we have done is to drop a perpendicular line from B to AD and use H to represent the foot of this perpendicular line. Since triangles ABH and DCH' are congruent and thus have the same area, we see that the original parallelogram has the same area as a rectangle with the same base length as the original parallelogram and height of the rectangle the same as the height of the parallelogram.

Figure 16
Similarly, one can use a geometric approach to finding the area of a triangle (1/2(base)(height)). Paste two copies of the triangle together to get a parallelogram. So the area of the triangle is half that of the parallelogram. Now use the argument above to convert the parallelogram to a rectangle.
The technical details of the Bolyai-Gerwien-Wallace Theorem involve triangulating a simple polygon (that is, introducing internal diagonals between existing vertices of the polygon to create all triangular faces), relating the area of these triangular pieces to rectangles which are 1 x a and stacking up these rectangles. As usual there are a fair number of technical details in all of this but the details can be carried out to get a rigorous proof.
The proof the Bolyai-Gerwien-Wallace Theorem holds does not provide data on what might seem interesting aspects of specific examples of dissections from one polygon to another. For example, one might look for the minimum number of pieces that A can be dissected into and reassemble the pieces to form B where A and B have some nice properties. A natural example is that A is a regular m-gon and B is a regular n-gon with the same area. Regular polygons are ones which have equal length sides and equal interior angles. Regular polygons are equilateral and equiangular.
Once one gets used to the idea that as remarkable a theorem as the Wallace-Bolyai-Gerwien-Wallace Theorem could actually hold, it may seem easy to jump to the conclusion that the same is true for higher dimensional analogues of polygons. David Hilbert made important contributions to geometry including an axiomatic treatment of geometry that "corrected" some of the problems that Euclid did not address properly.
Figure 17 Photograph of David Hilbert
Hilbert generated a famous set of problems in about 1900 whose solution he thought might give insight into new directions for mathematical advances and require new mathematical tools. As his Third Problem (my restatement) in this collection he asked:
Given two polyhedra with the same volume can one cut one of them up into a finite number of polyhedral pieces so that the pieces can be reassembled to form the other?
One way of thinking of the Bolyai-Gerwien-Wallace theorem is that one does not need ideas of calculus to deal with polygonal area questions in two dimensions. However, given the regular tetrahedron (4 congruent faces all equilateral triangles) and a regular cube (6 congruent squares) of the same volume, one cannot cut up the tetrahedron into convex polyhedra pieces and reassemble the pieces to form a cube. This fact was shown by Max Dehn (1878-1952). Hence, for polyhedra volume questions in three-dimensional space one really needs Calculus!
Another amazing theorem about polygons is related to a spectacular theorem in graph theory that deals with when a graph drawn in the plane with straight line edges (which can self-intersect) is rigid.
It was mentioned above that triangles are rigid graphs, and perhaps it will not surprise you that if one triangulates a simple polygon to obtain a graph which all of whose faces except the unbounded face are triangles, then this graph is also rigid for forces applied within the plane.
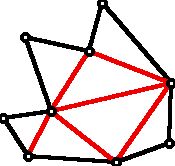
Figure 18 (A triangulated polygon, internal diagonals shown in red.)
All of the regions of this graph are triangles except for the "infinite" region (face) which is a nonagon (9-sided). As a rods structure in the plane this is a rigid structure. However, if you build a stick model of this you may be "confused" about its rigidity because if you hold it in your hands rather than let it sit on a flat table, it will flop around. This is because the structure can flex in 3-space! Thus, if you place this stick model on a table and you can lift up the lower right hand vertex of the structure, that vertex will move along with the two sticks attached to it. However, if you leave the model on a table and push gently on any of the vertices on the infinite face, the whole graph may move but the vertices will not move with respect to one another. The same would be true for graphs with all triangular faces except perhaps the unbounded face with internal vertices (Figure 20), which can be pushed in the plane too and no flexing will occur. These graphs are rigid in the plane but not in 3-space.
If one deletes even one diagonal (red edges) from a triangulated polygon (see Figure 20) one creates a quadrilateral and the resulting structure will not be rigid. This perhaps is not surprising because after deleting a diagonal a 4-gon is created. However, the situation is more complicated than merely the presence or absence of 4-gons. Figure 19 shows a graph which has been drawn in the plane so that edges meet only at vertices. It has four triangular faces and one bounded 5-gon face. The unbounded face (infinite face) is a 5-gon.

Figure 19 (A graph which is rigid in the plane. Diagram courtesy of Wikipedia.)
Without making a physical model it might be tempting to think that this graph would flex in the plane but remarkably it is rigid. Not surprisingly it remains rigid if one adds the additional edges shown in thick black in Figure 20.
Figure 20 (A graph which is rigid in the plane but not "minimally" rigid. Modified version of a Wikipedia diagram.)
Had you seen this figure first, you would not be surprised it is rigid but it is not minimally rigid since removing the two dark edges results in a graph which is still rigid, the graph in Figure 19. The graph in Figure 19 is known as the Moser spindle, after the Canadian geometers Leo Moser (1921-1970) and William (Willy) Moser (1927-2009).

(a)

(b)
Figure 21 (Leo (a) and WIlliam (b) Moser)
In addition to being rigid the graph in Figure 19 requires four colors to color it and can be redrawn in the plane so that all its edges are distance one from each other.
Is there a way to tell when a graph drawn in the plane (possibly with edges that meet at points other than vertices) is minimally rigid, that is, it is rigid and if one removes even a single edge it will flex? This question was given a remarkably simple answer in 1970 by the Dutch mathematician Gerard Laman (1924-2009).
Laman's Theorem:
If G is an n-vertex graph with exactly 2n-3 edges, and every subgraph of G with exactly k vertices has at most 2k-3 edges then G is minimally rigid.
Figure 22 (Photograph of Gerard Laman, courtesy of Wikipedia.)
The Moser spindle (Figure 19) is an example of a planar graph (can be drawn in the plane so that edges meet only at vertices) which obeys the hypotheses of this theorem, and the graph shown in Figure 23 is non-planar, that is it cannot be redrawn in the plane so that edges meet only at vertices.
Figure 23 (A non-planar minimally rigid graph. Diagram courtesy of Wikipedia.)
Actually, there are different kinds of rigidity just as there are different kinds of polygons, and each of these rigidity concepts comes with its own precise definition. Of course there are many other exciting results about polygons/graphs that are worthy of study.
Comments?
Unsolved problems about polygons
We have already noted that plane polygons can be either convex or non-convex. Recently geometers have looked at questions in which one starts with a point set in the plane and asks questions regarding how such sets behave.
For example, given a set of points in the plane, is it always possible to have these points be the vertices of a simple polygon? As you probably realize, if all of the points lie on a single straight line this will not be possible but the following is a theorem:
Theorem:
If a set of points in the plane don't all lie on a straight line then it is possible to "polygonalize" the set of points, that is find a simple polygon whose vertices are the points of the set.
While this theorem is intuitively clear, in fact it requires some care to prove because there are so many different ways that a set of 14 points might look, that finding an approach to polygonalize any one of the possible point sets requires care. To practice, you might look at some of the different ways that one can polygonalize the 12 points in Figure 10. You will quickly see that there are lots of different ways to polygonalize this particular choice of positions for 12 points. Can you find a polygon which passes through all 12 points in Figure 10 so that the angle at each vertex is 90, 180, or 270 degrees? What conditions on a point set must hold for there to a polygon passing through the points where the angles at each vertex of the polygon are 90 or 270 degrees? How does the total number of polygonalizations on this set of points compare with the number of "rectilinear" polygonalizations on this set of points? State a general version of this problem. Mathematics grows when new questions are asked. It is fun to pose such questions and to try to answer them.
For those who think that mathematicians have exhausted the questions that can be asked about polygons and other geometric figures there are many such open problems that are relatively easy to state. Here is an example from the Open Problems Project initiated by Eric Demaine and Joseph O'Rourke, where several open problems about polygons appear as well as many other open geometrical questions.
Problem 16: Simple Polygonalizations
Can the number of simple polygonalizations of a set of n points in the plane be computed in polynomial time? A simple polygonalization is a simple polygon whose vertices are the points.
Many questions and issues related to polygonalizations are summarized here.
http://erikdemaine.org/polygonization/
Most of these investigations grew out of the question: What is the number of simple polygonalizations of a set of n points in the plane, maximized over all sets of such points?
So given a collection of examples of things that have been called polygons, what common properties can one extract? This is not so easy because what you see, and words that come to mind to describe the properties that you see are quite varied, in English, independent of what words might come to mind for someone versed in other languages. When you give precise definitions, too often all that non-experts do with these definitions is to memorize them and parrot back the words when asked, "What is an X?" often without true understanding of what an X is and often without being able to provide examples that illustrate the definition. There are advantages to drawing lots of diagrams, trying to understand what is special about these examples and diagrams, and building up insight. So precise mathematical definitions have their place but sometimes can also choke off interest in mathematics.
Comments?
References
Alonso, O., Grünbaum's convex quadrangles enumeration and an extension of the angle-side reciprocity of quadrangles, Geobinatorics 20 (2010) 45-47.
Alonso, O. and J. Malkevitch. Classifying Triangles and Quadrilaterals, Mathematics Teacher 106.(2013): 541-548.
Alonso, O., and J. Malkevitch,. Enumeration via Partitions, Consortium 98 (2010): 17-21.
Boltyanskii, V., Equivalent and Equidecomposable Figures, D. C. Heath, Boston, 1963.
Boltianskii, V., Hilbert's Third Problem, Wiley, New York, 1978.
Devadoss, S., and J. O'Rourke. Discrete and computational geometry. Princeton University Press, 2011.
Euclid, The Thirteen Books of The Elements, Dover Press, New York., 1956.
Frederickson, G.,, Dissections Plane & Fancy, Cambridge U. Press, NY, 1997.
Frederickson, G., Hinged Dissections: Swinging & Twisting, Cambridge U. Press, NY, 2002.
Goodman, J. and J. O'Rourke (eds), Handbook of Discrete and Computational Geometry, 2nd. ed., Chapman & Hall/CRC, New York, 2004.
Gray, J., The Hilbert Challenge, Oxford University Press, New York, 2000.
Grünbaum, B., Regular polyhedra—old and new, Aequationes Mathematicae 16, no. 1-2 (1977): 1-20.
Grünbaum, B., "The angle-side reciprocity of quadrangles." Geombinatorics 4(1995), 115 - 119.
Grünbaum B. Are Your Polyhedra the Same as My Polyhedra?. In Discrete and Computational Geometry, eds. B. Aronov, et al., 2003, . Springer Berlin Heidelberg., pp. 461-488.
Grünbaum, B., Polygons: Meister was right and Poinsot was wrong but prevailed. Beiträge zur Algebra und Geometrie/Contributions to Algebra and Geometry 53 (2012) 57-71.
B. Grünbaum, The angle-side reciprocity of quadrangles. Geombinatorics, 4 (1995) 115-118.
B. Grünbaum, Side-angle reciprocity - a survey. Geombinatorics, 2 (2011) 55-62.
Hilbert, D., The Foundations of Geometry, Open Court, Chicago, 1899.
Laman, G., On graphs and rigid plane skeletal structures, J. Engineering Mathematics 4 (1970) 331-340.
Rajwade, A., Convex Polyhedra with Regularity Conditions and Hilbert's Third Problem, Hindustan Book Agency, New Delphi, 2001. (AMS distribution.)
Usiskin, Z., Griffin, J., Witonsky, D., and Willmore, E., The classification of quadrilaterals: A study of definition, IAP, Charlotte, 2008.
Wagon S. Circle-squaring in the twentieth century. The Mathematical Intelligencer, 3( (1981)76-81.
Those who can access JSTOR can find some of the papers mentioned above there. For those with access, the American Mathematical Society's MathSciNet can be used to get additional bibliographic information and reviews of some these materials. Some of the items above can be found via the ACM Portal, which also provides bibliographic services.
Joseph Malkevitch
York College (CUNY)
Email Joseph Malkevitch